Dextrous Robot Hands
Our experience in developing, building and using dextrous robot hands reaches
back to 1993. Our workscope covers all areas from multisensory mechatronic hand
design up to control of the hands including telemanipulation, autonomous
grasping and manipulation. The experiences gained with the real system result in
new requirements for the next generation design steps.
Following our mechatronic design approach the current generation of dextrous
robot hands at our lab - DLR Hand II - is a reliable, flexible and powerful
multisensory and fully integrated design with a hot pluggable tool retainer and
is rated as one of the most advanced and complex artificial hands in the
world.
 |
DLR Hand II
In the future, service
robots will need mobility, light-weight yet powerful arms and
articulated hands. We are convinced that the DLR Hand II – even
better in combination with DLR’s light weight arm developments – is
an important contribution to reach these goals. |
Full article |
|
|
|
|
|
 |
Sensors of DLR Hand II
A dexterous
robot hand for teleoperation and autonomous operation needs as a
minimum a set of force and position sensors. Various other sensors
add to this basic scheme. |
| Full article |
|
|
|
 |
DLR/HIT Hand
Based on the DLR Hand
II, HIT (Harbin Institute of Technology) and DLR (German Aerospace
Center) have jointly developed a multisensory robot hand. |
| Full article |
|
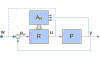 |
Control
Several Controllers have
been tested on DLR Hand II. Cartesian and joint level impedance
controllers have been implemented. Also force control has been
tested. |
| Full article |
|
|
|
 |
Previous Versions
The DLR
Multisensory Hand II has evolved over many years of research. Many
hands were developed in these years. These include the DLR Hand I
and the DLR Three-Finger Hand. |
| Full article |
|
|
|
|
|
|
|